The objective of this project is to build a mechatronic system to study proprioception in young children. This system includes a mechanical design for the experimental setup, and software for acquiring sensor data and delivering automated audiovisual feedback. The targeted age of children is between 3 and 6 years old. The developed system provides visually attractive interfaces that adapt to the participant’s interactions. The experiment contains a test to quantify a participant’s maximum voluntary torque, as well as their perception. This system runs an automated experiment and records data for post-hoc analyses.
Motivation
Numerous studies have quantified proprioception in adults. However, less information is available about children. The goal of this project is to develop an experiment to permit proprioception to be quantified in children. The long-term goal of this project is to, using the system developed, understand the extent to which children who have neurological impairments also have proprioceptive deficits.
Method
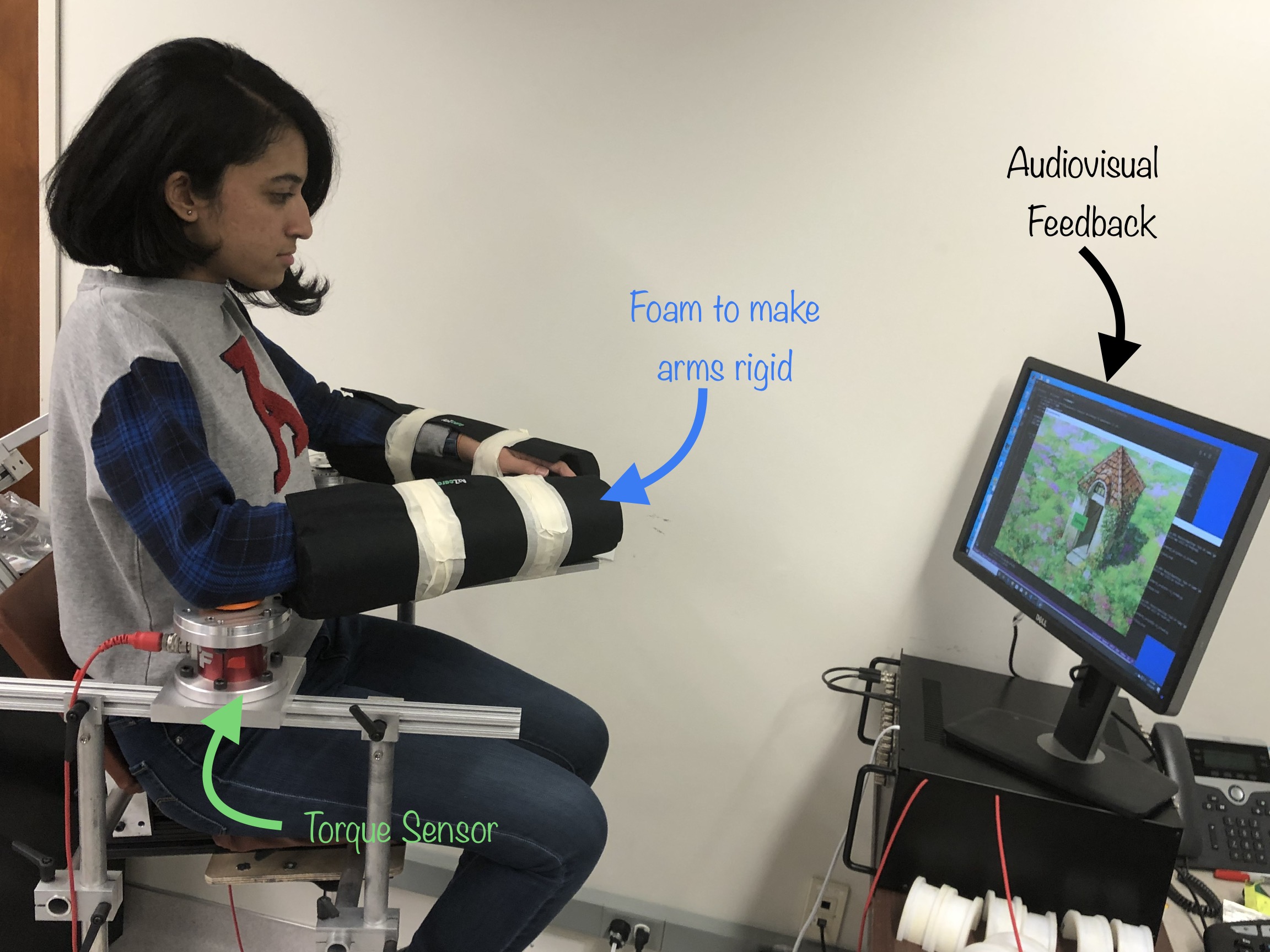
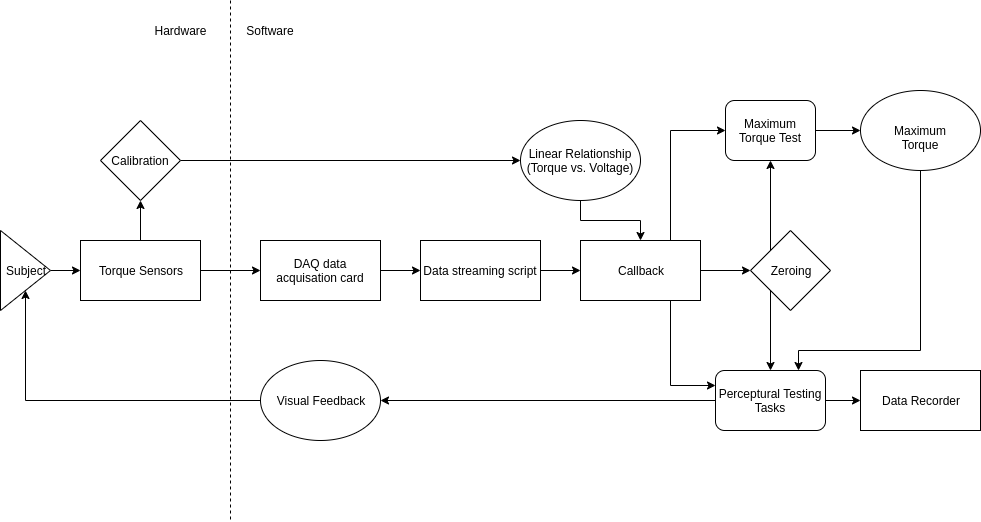
Experiment Setup
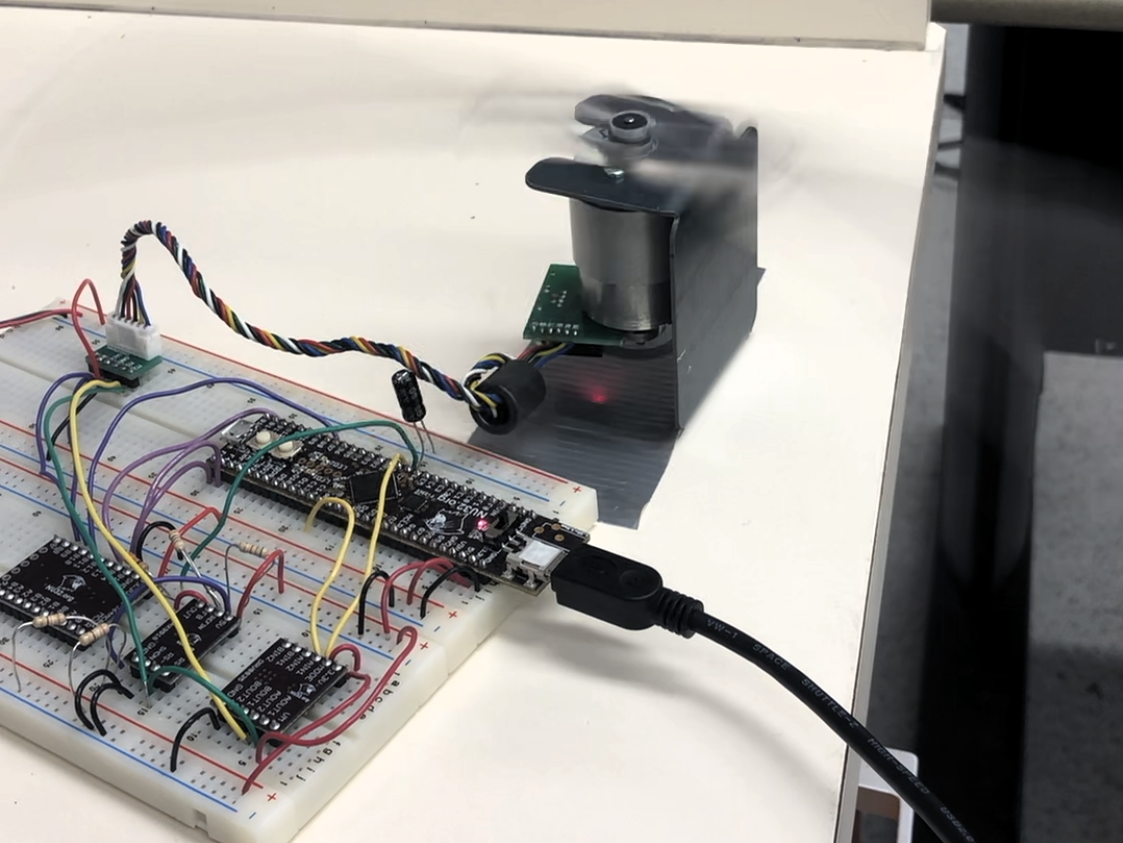
The system acquires torque data indicating the extent to which the participant is flexing and extending about each elbow joint through two torque sensors. We used a DAQ card for data acquisition. A python script streams the sensory data at 1000Hz and passes signals to a callback function. The callback function utilizes the linear equation resulted from the [calibration](calibration/README.md) process to convert a voltage signal to the actual torque generated by the participant. A zeroing function can also be called to remove an offset in the voltage signal. The perceptual testing tasks use the results from the maximum voluntary torque test (maximum torque), as well as the real-time torque to determine the audiovisual feedback. The system renders the visual interface at 27Hz and records data at 1000Hz.
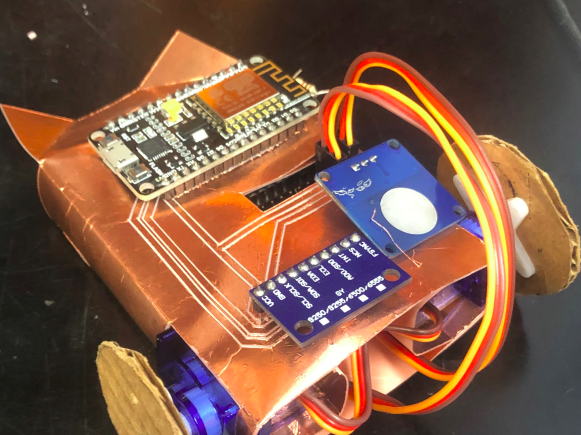
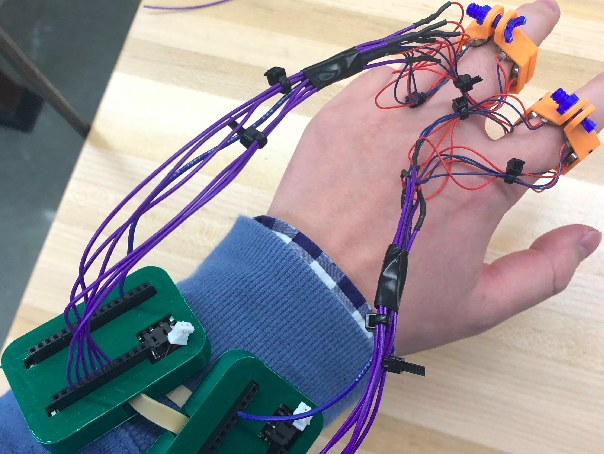
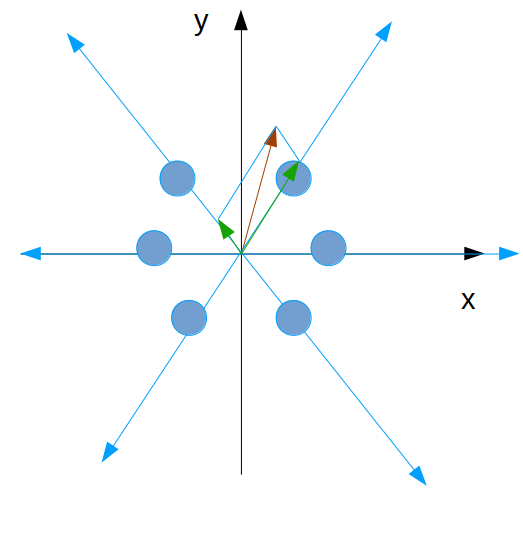
The objective of this project is to develop a haptic feedback device to simulate the active whisking of a robotic rat. Previous works have demonstrated that rats can sense the environment from the bending of their whiskers. This project tries to explore this phenomenon by delivering such a sense of bending to humans haptically. The device includes six micro vibration motors in a group to represent the magnitude and direction of a signal. We use the Wi-Fi module of multiple micro-controllers to have a portable and accessible device.
Method
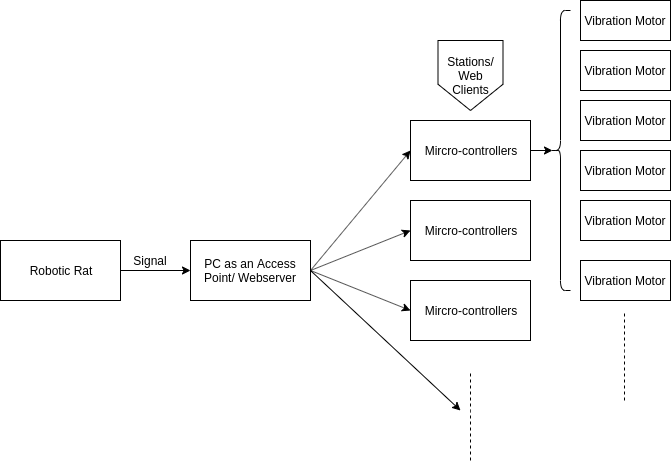
System Pipeline
We use vibration motors to represent signals from the robotic rat. The computer receives the signal through the USB port and serves as an Access Point to broadcast filtered signals. Several micro-controller connect to the AP, serves as stations, and listen to incoming signals. Each micro-controller is assigned to proceed with one whisker data and uses output compare pins to control motors based on the direction and magnitude of such data. The stream of signals from the robotic rat was tested at 200Hz. Each vibration motor updates its frequency at 1Hz.
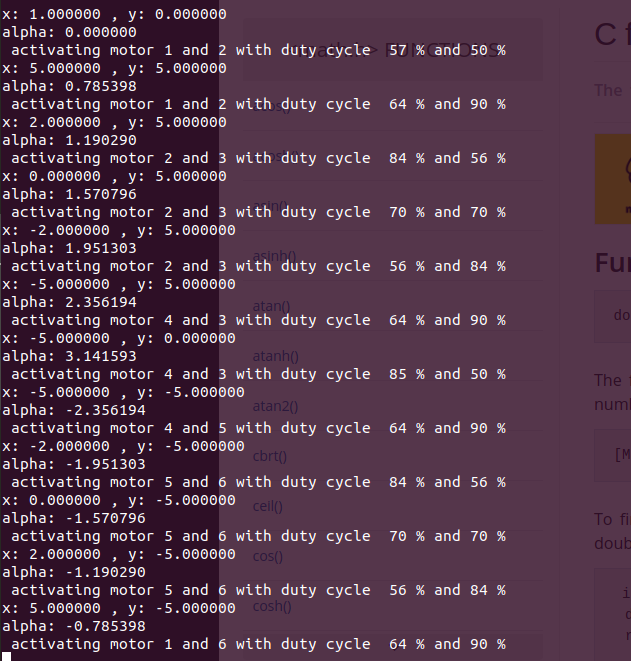
Current Software Interface of the Haptic Feedback Device
The micro-controller takes input of the signal as a format of (x,y). It computes which two motors are required to describe the direction and duty cycle, respectively.
Projection based on the Geometric of the Haptic Feedback Device
This project involves advanced techniques of Digital signal process, Machine Learning, and common algorithm in Neuroscience. The documentation also will discuss different algorithms and how they fit with various types of data used in this project as a research topic.
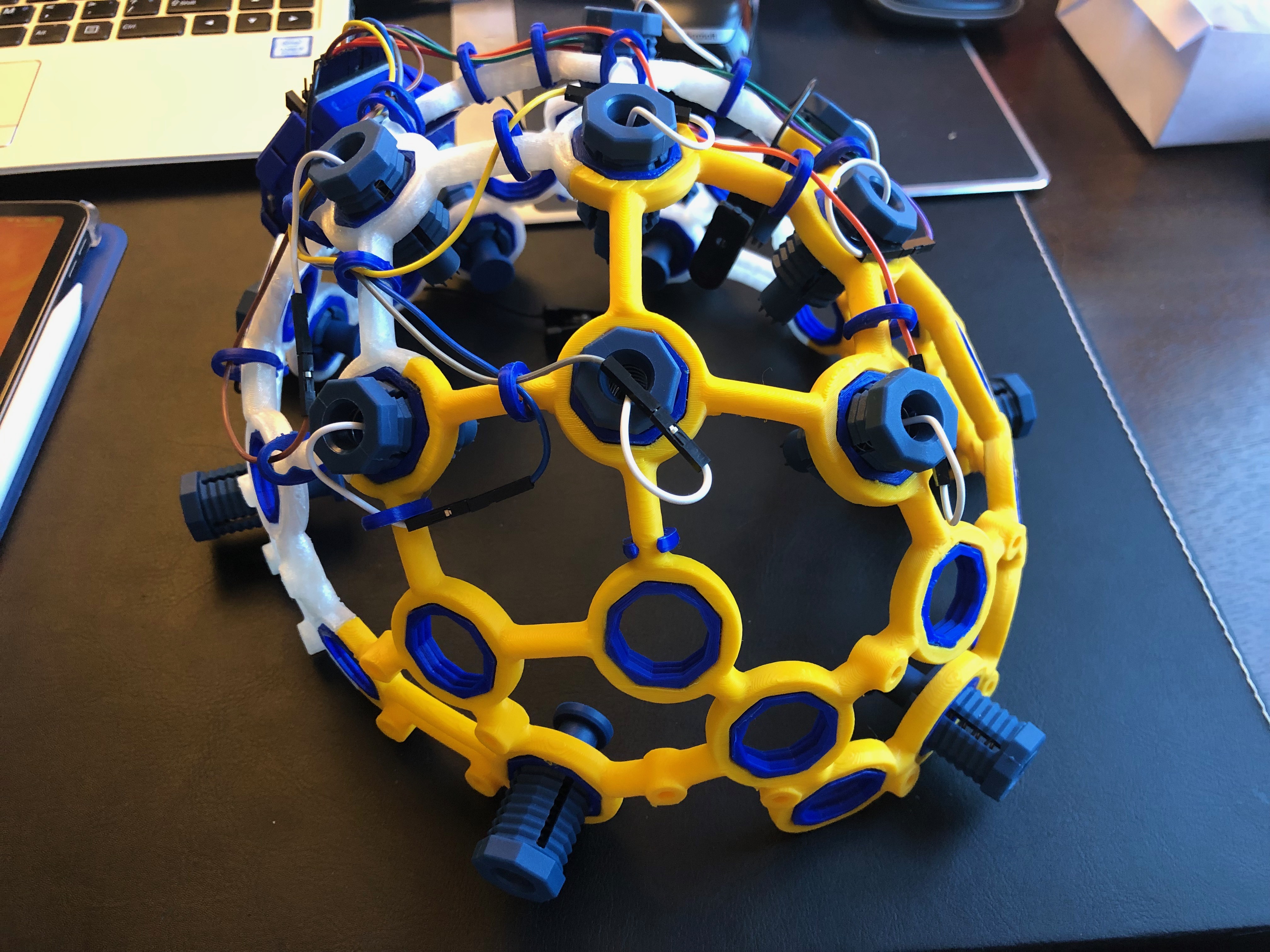
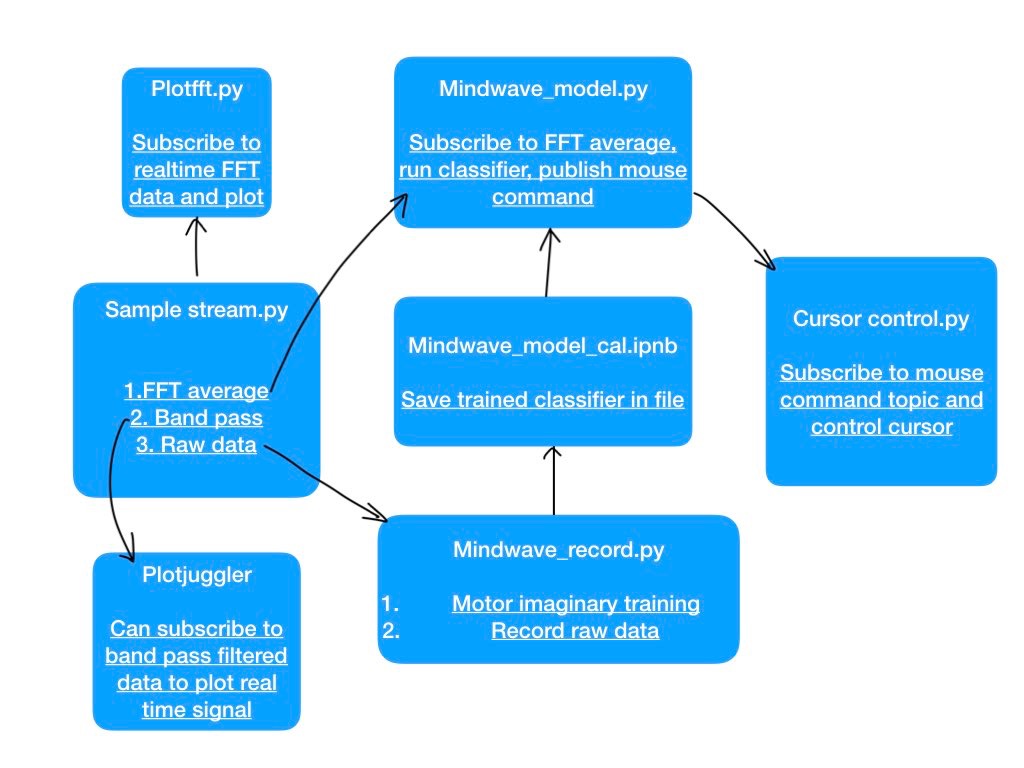
Block diagram of ROS nodes in Mind-wave cursor control system
The objective of this project is to control cursor movement on the computer by human intention through brain computer interface (BCI). It includes an electroencephalography (EEG) data collection from EEG monitor. The monitor is expected to track the electrical activity (bio potential) of the brain (mainly focus on motor cortex, the part of brain oversees movement). The project is mainly focusing on classify left or right movement for now. The completed project allows subjects to think about executing cursor movement with corresponding hand movement and covert mind-wave signal to real-time cursor movement.
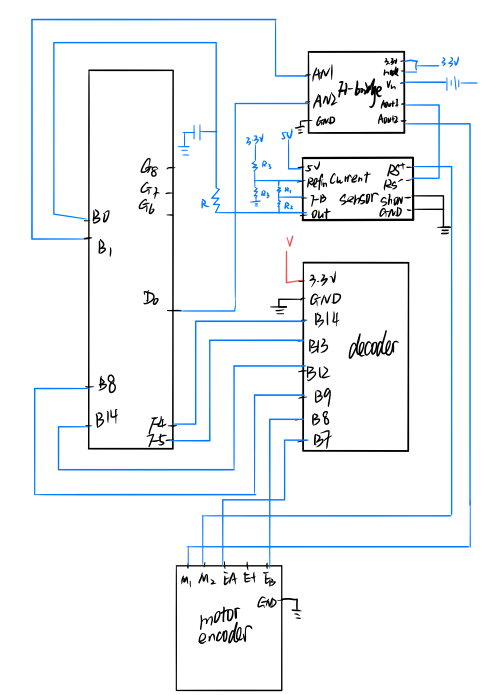
This is a mechatronics project that uses PIC32 to control motor through PID. The project allows the motor to move to certain position (in degree) without overshoot and in a reasonable range of raise time. Besides that, the motor is allowed to move along user input trajectory as well. The microcontroller was programmed through C to keep tracking motor positions and input current by adapting two feedback loops. It sends required current to motor through H-bridge and sends data back to computer so it can plot and show performance of such controller parameters.
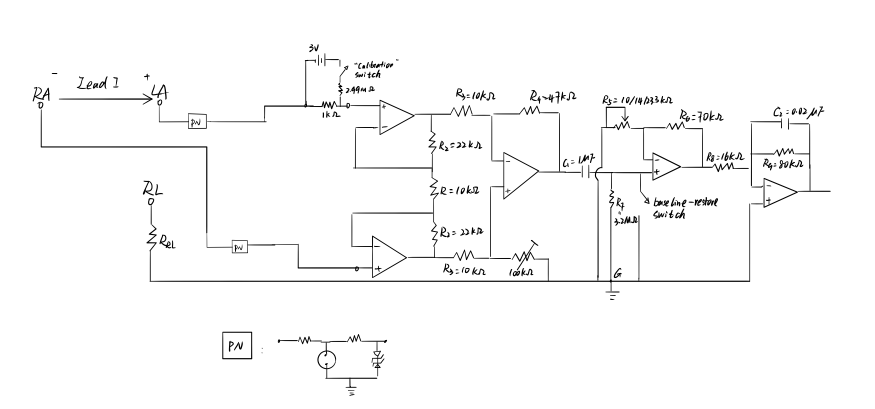
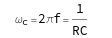
The project is to design and build an ECG monitor from scratch. The circuit includes an op-amp and two band pass filters. It also includes several electrical elements as protection for bio usage, such as manual baseline-restore switch, input over-voltage protection, and self-calibration switch for ECG. The built equipment could also switch voltage-gain values of 500, 1000 and 2000. The demo video shows a diagram of LEAD I ECG through DEGILENT Wavelet. The project also observes the impedance change through bio potential when subject inhaled and fill air one's pulmonary system
Circuit Diagram of ECG Amplifier System
Specifications
- Bandwidth : 0.05 to 100 Hz - Manual baseline-restore switch - Input over-voltage protection - Battery powered manual 1-mV self-calibration switch - Voltage-gain values of 500, 1000, and 2000
Design
The voltage-gain value of the amplifier system was consisted of an op-amp (OP484), an active high pass filter, and an active low pass filter. The theoretical gain will follow the following equation.
Where R1 to R7, C1, and C2 is the corresponding Resistors and Capacitors in circuit diagram.
The design of band pass filter follows the rule as following. Where Wc is corner frequency and f is desired bandwidth
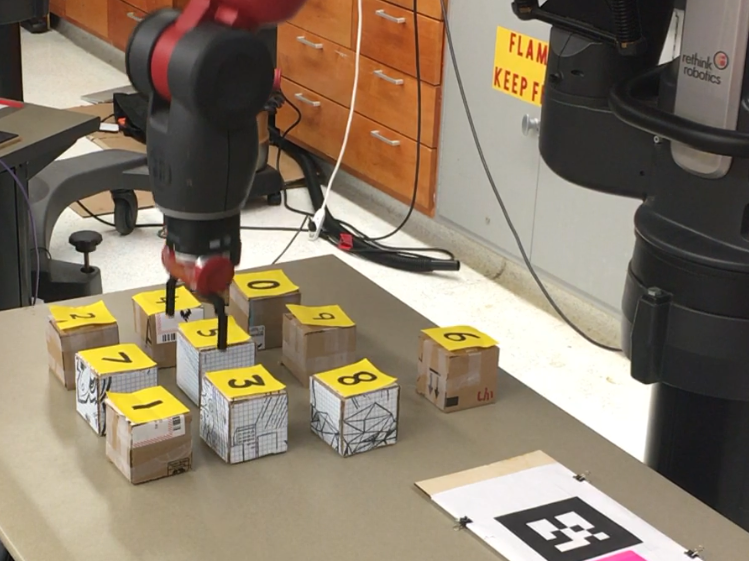
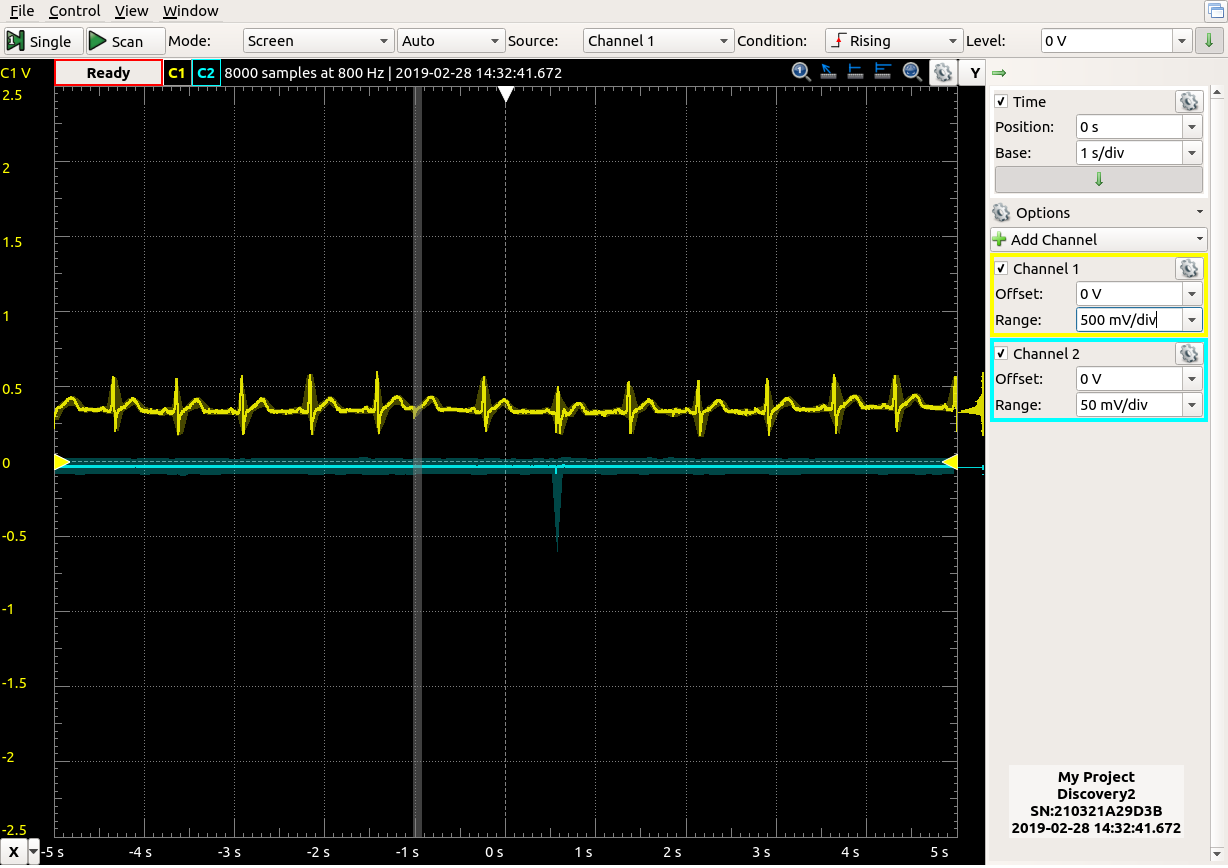
The demo video shows the Baxter received a 2-digit number, performed number decompose computation, and fetched two resulted numbers
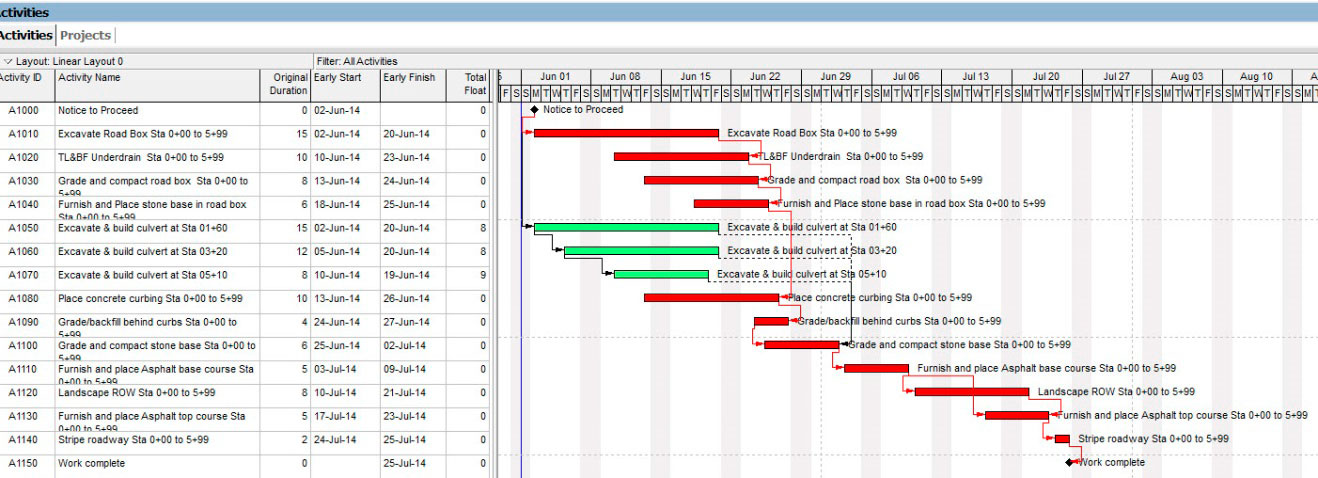
Actual settings and equipment layout
The project goal is to allow Baxter, manufactured by Rethink Robotics, to perform robust block pick and place using single digit handwritten numbers on the object. The project includes a session of machine learning to recognize handwritten numbers and locate such object in camera frame. Another package works with AR tag assistance to generate the actual transformation matrices in real-world unit from pixel location in camera frame. The robot is able to read such object information quickly and perform pick& place with optimized trajectory planning and without any collision with surroundings.
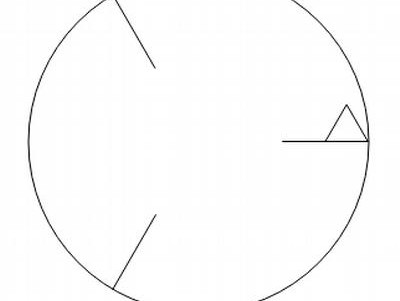
The project is a dynamics simulation of block in a tumbler by applying Euler Lagrange Equation through Mathematica. The motion has been divided to 7 parts. This project shows techniques expansion from theory and ability of building physical model.
• Trajectory 1 : The block starts from blade 2 (right side blade) and sliding down form the blade. The blade was treated as varying constraint on two corner points of triangular block. The block will fall after sliding from the blade.
The constraint was off when the mid bottom point of triangle pass beyond the blade inner tip by using “Whenevet” and setting left hand side of E-L to zeros. • Trajectory 2 : The block fall from the blade and hit the tumbler inner edge with a plastic impact. From animation A2, it is more obvious to see the plastic impact make the block move along the tumbler edge for a few seconds. • Trajectory 2.5 : Another corner of block impact with the tumbler. It is hard to tell from the animation that two corners of the block hit the tumbler separately. The time of those two impacts are very close (2.19386s and 2.19459s)
• Trajectory 3 : Take the velocity update computed from Trajectory 2.5 and set the inner edge of tumbler as a constraint on two corners of the block. The animation shows the block sliding at the bottom of the tumbler with initial velocity given from Trajectory 2.5 • Trajectory 4: The block is sliding on the bottom of tumbler until it hit by the coming blade ( blade 3 in this case) as another plastic impact. The impact law was used to compute updated velocity. • Trajectory 6: Simulate the animation until the block reach the same position as the beginning of animation.
The project is to perform dermatology diagnose through machine learning techniques those built from scratch. The algorithms used in this project includes feature selection, boosting selection, gradient descent, and fusion rule. The GUI was allowed to return the probability of certain prediction back to user. More detail was explained through the above demonstration video.