Portfolio
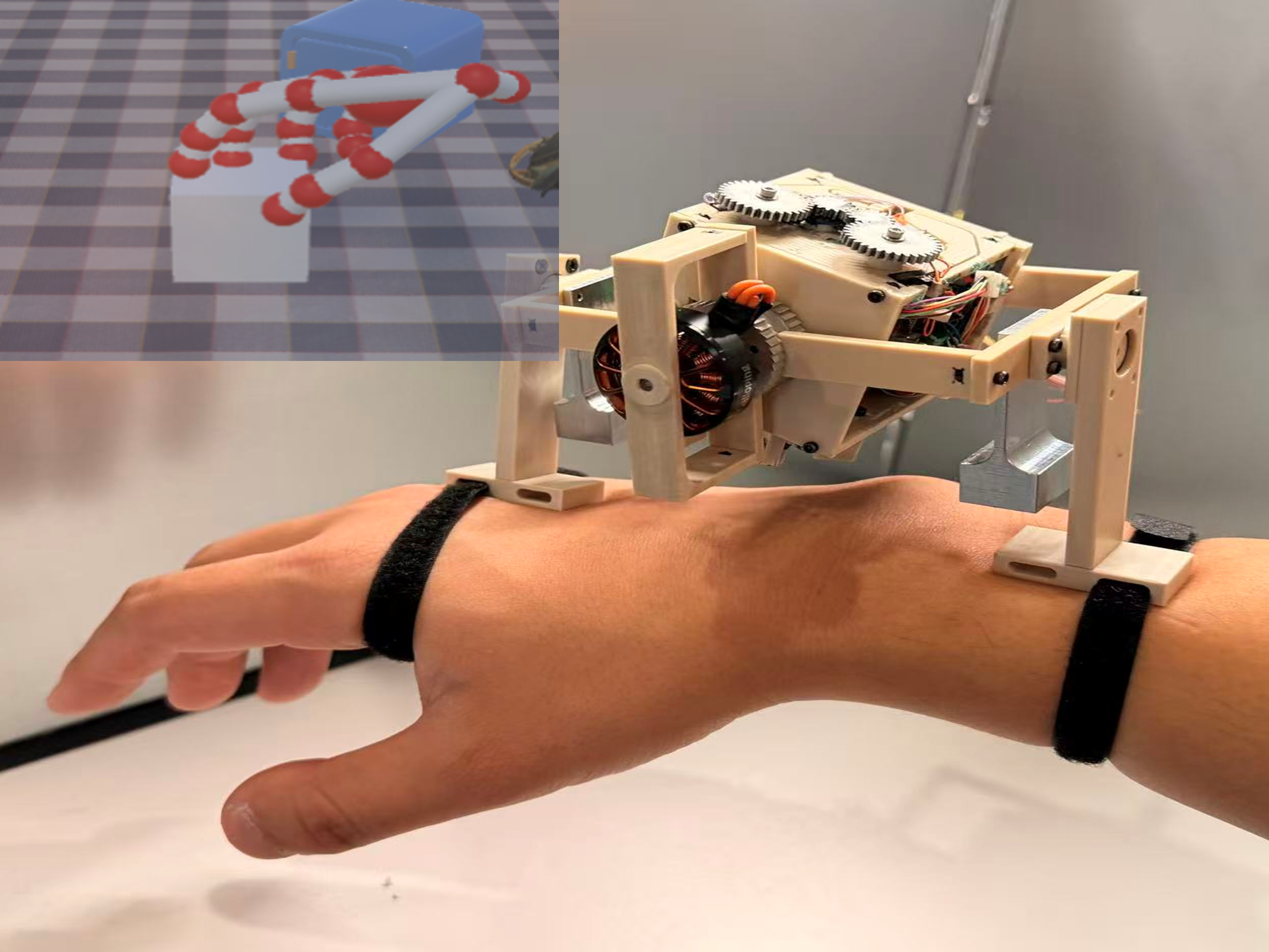
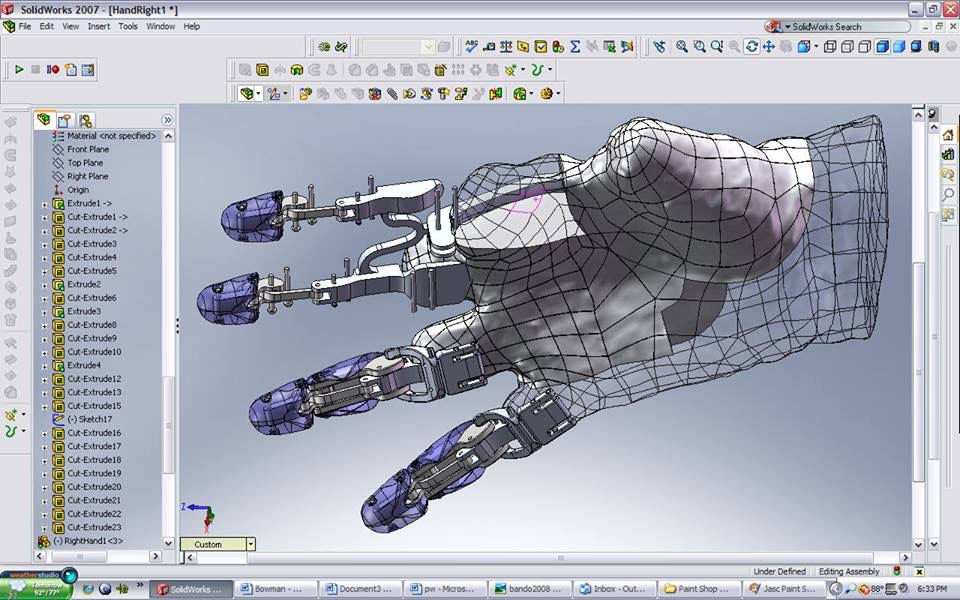
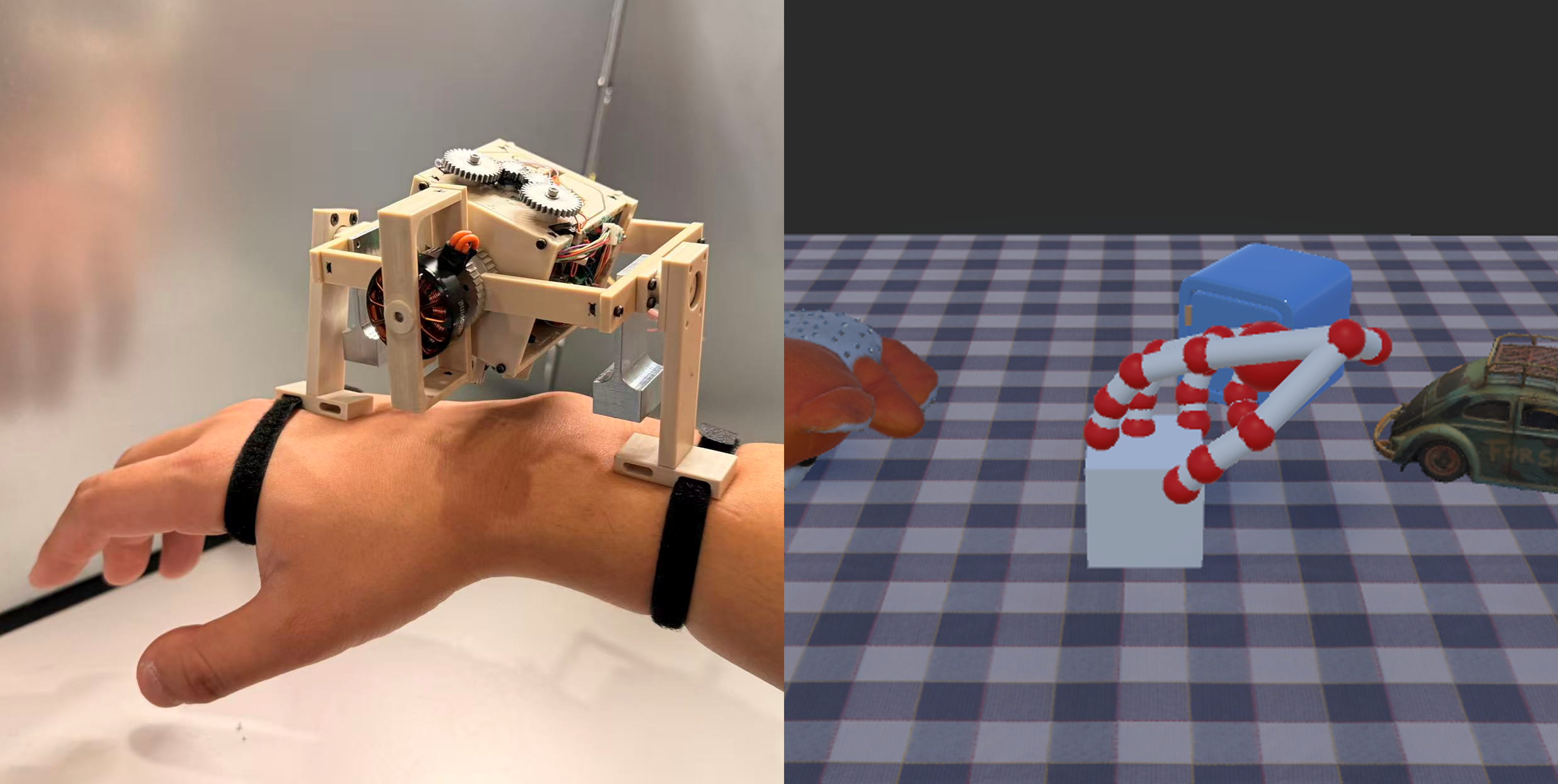
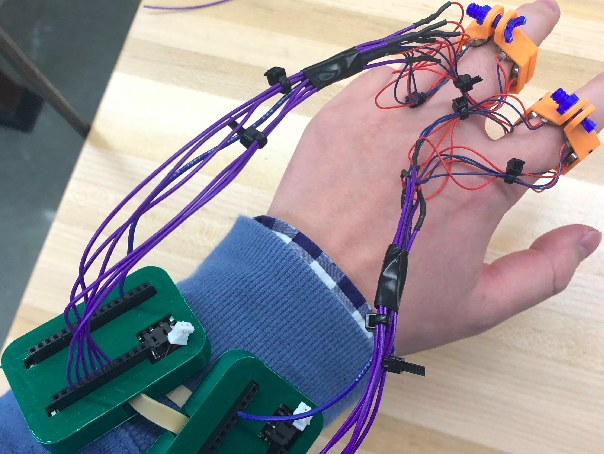
Virtual Weight Rendering via Haptic Wearables
Mechanism Architecture | UX | HCI | Bio-robotics
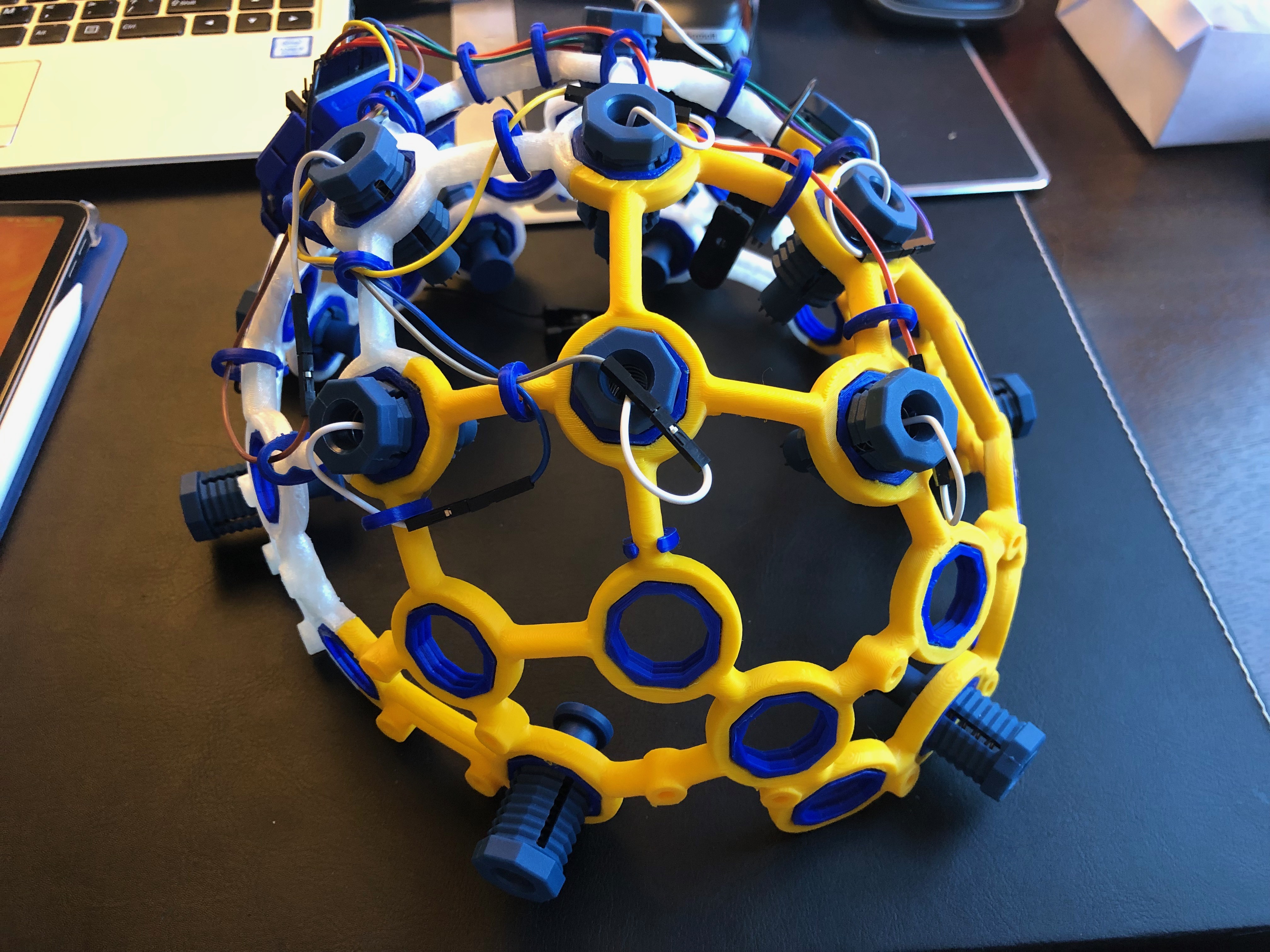
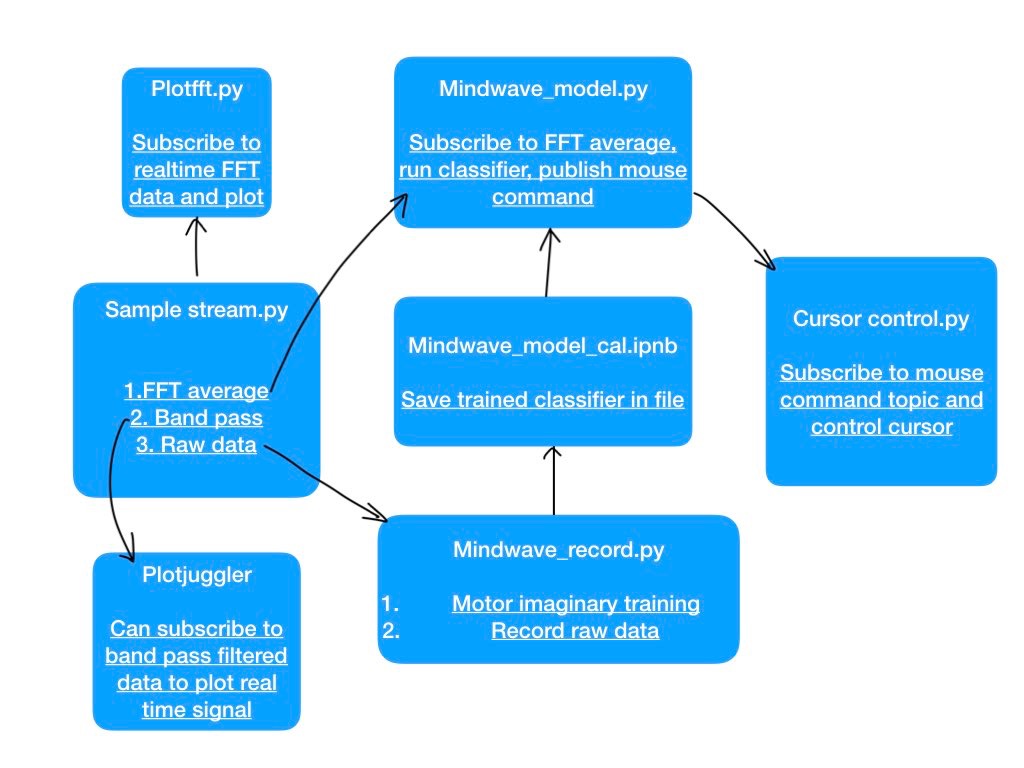
Cursor Control with Mind-wave
BCI | Machine Learning | Signal Processing

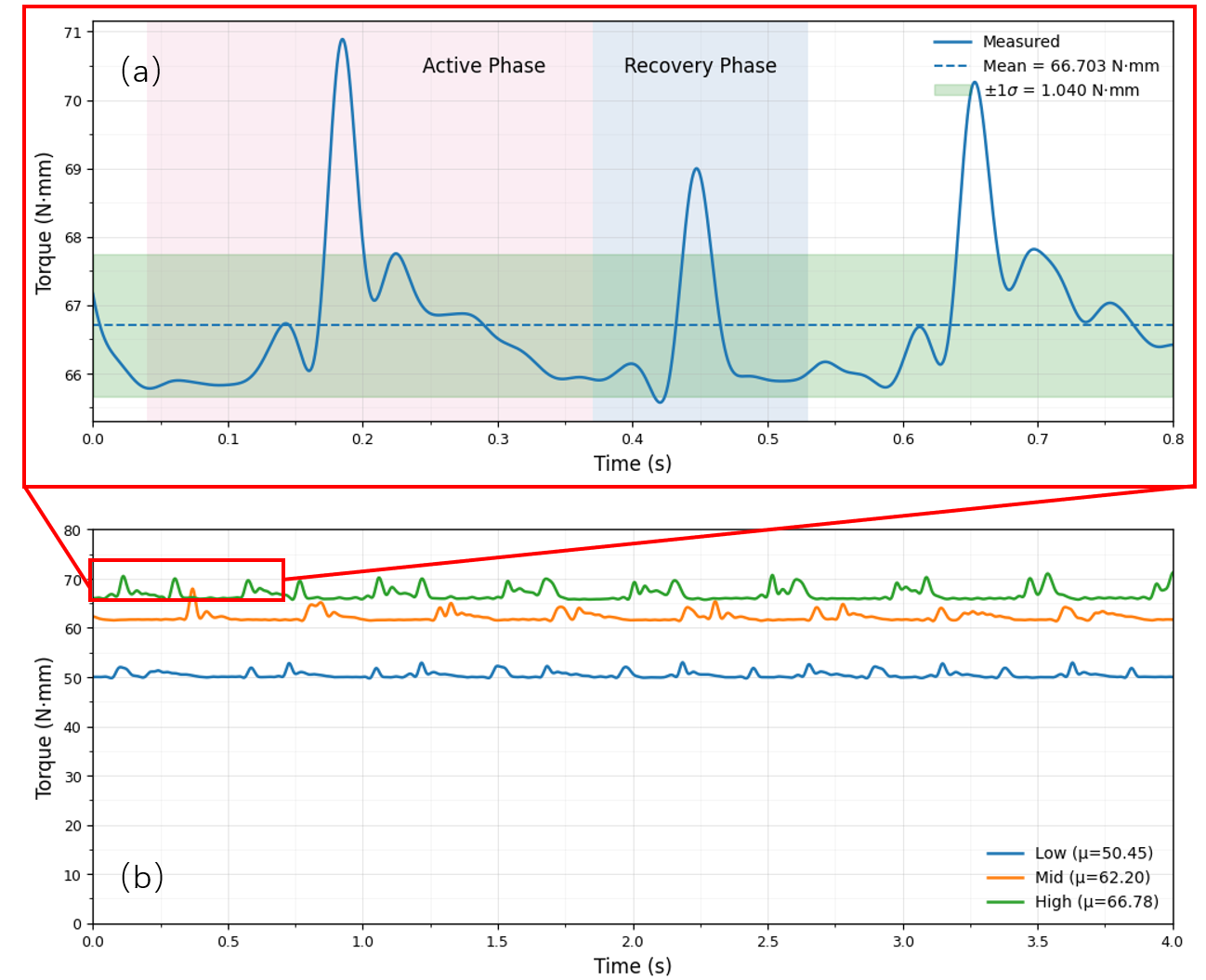
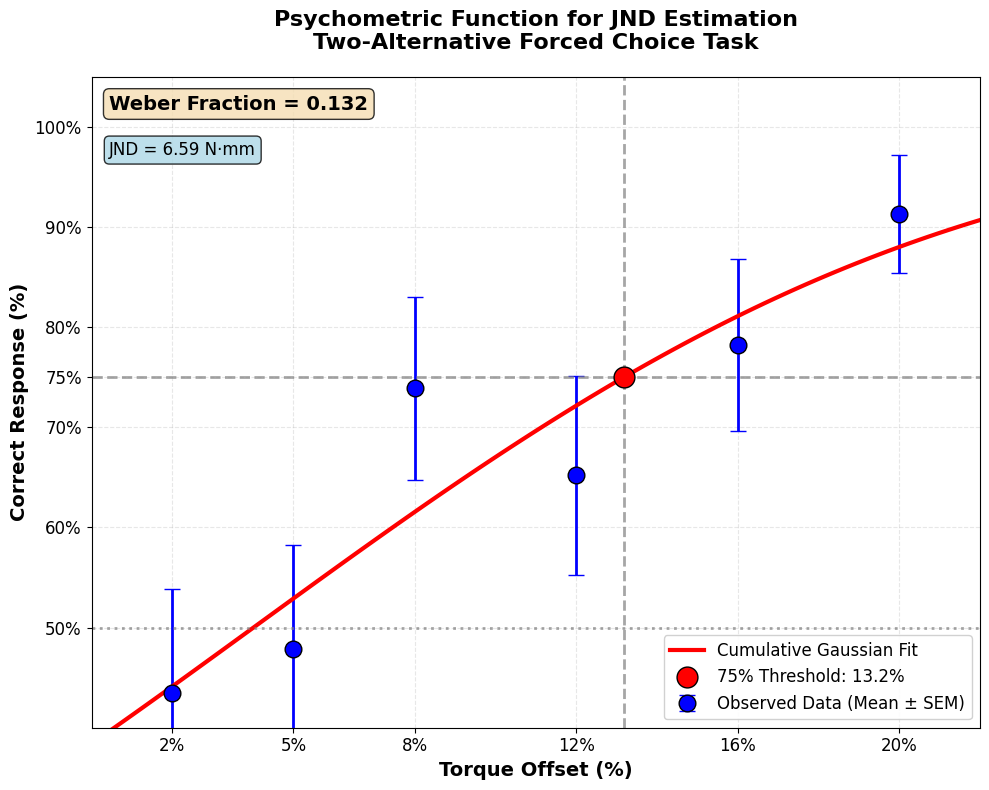
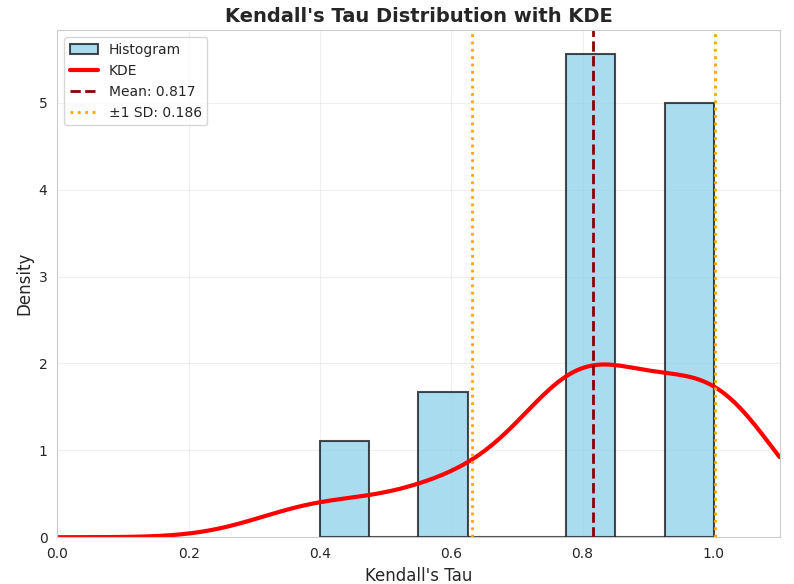
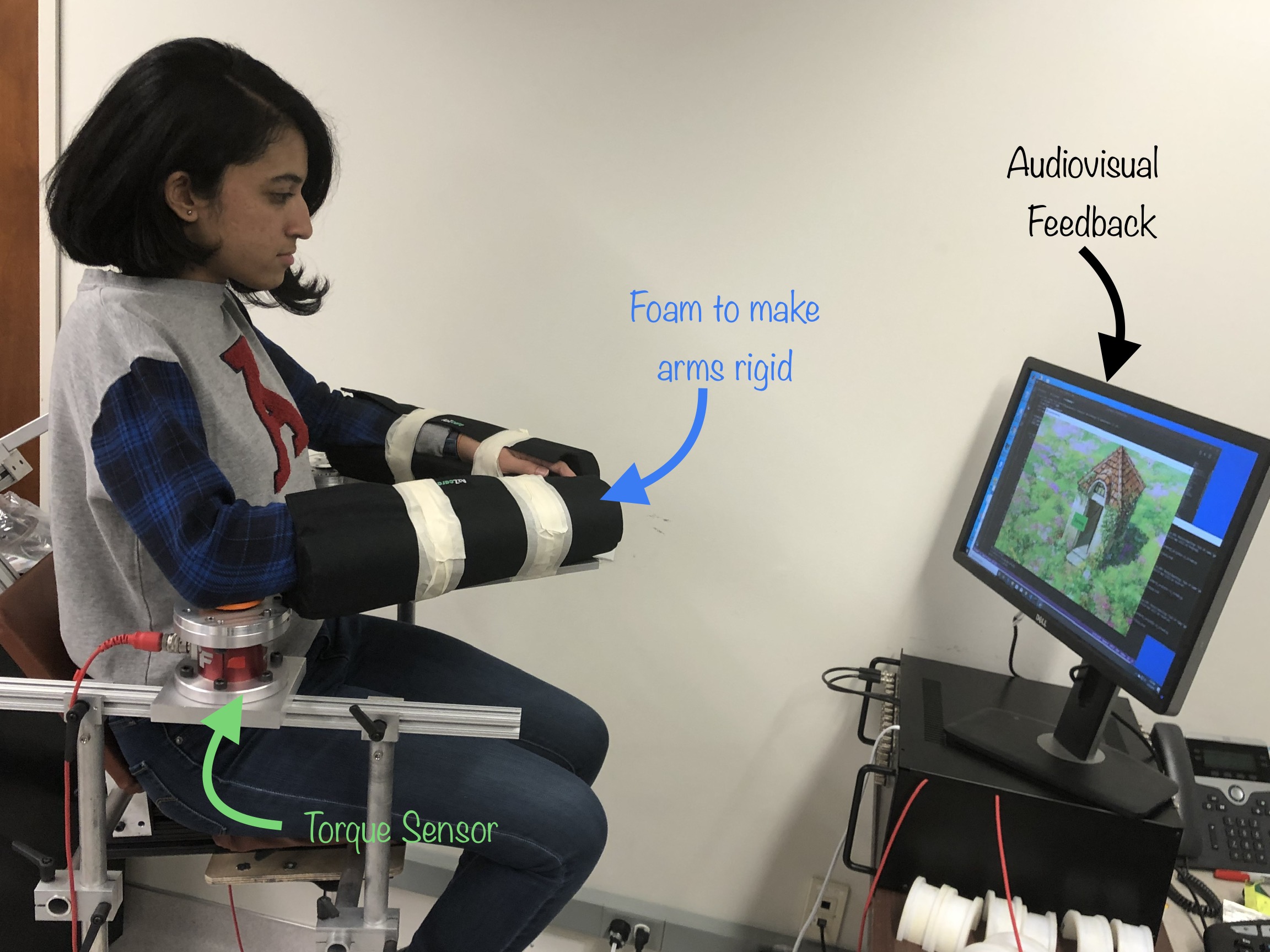
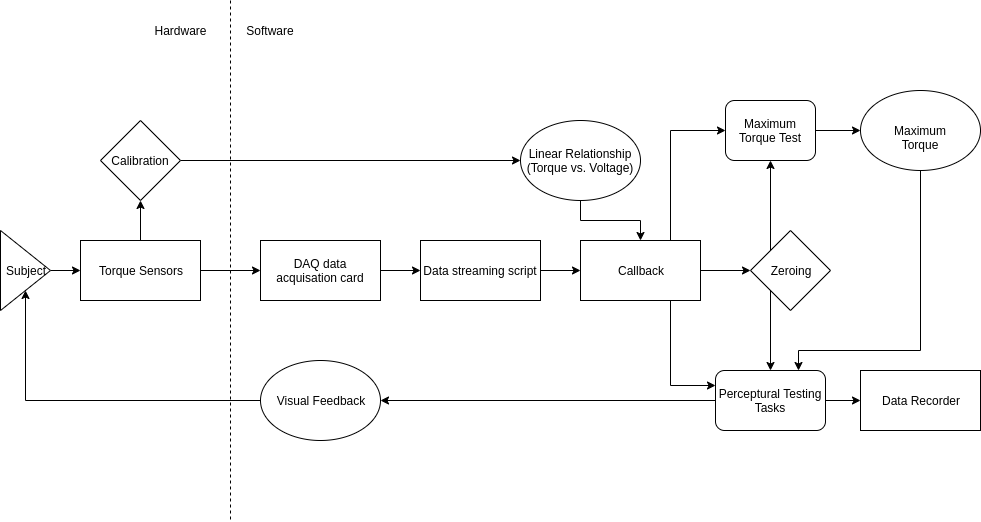
Mechatronic System for Proprioception Study
HCI | Interfacing | Biosensor
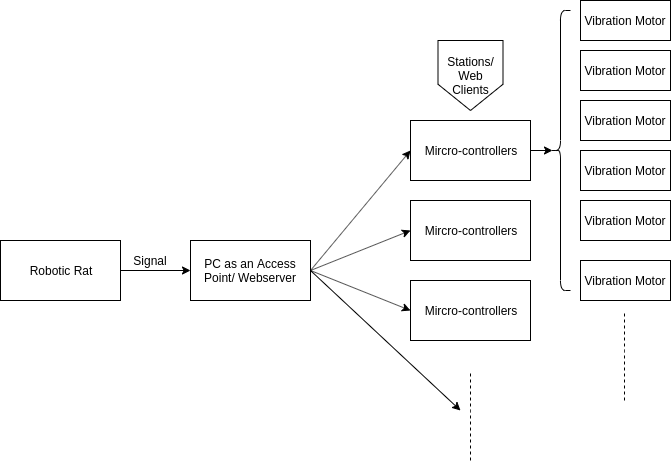
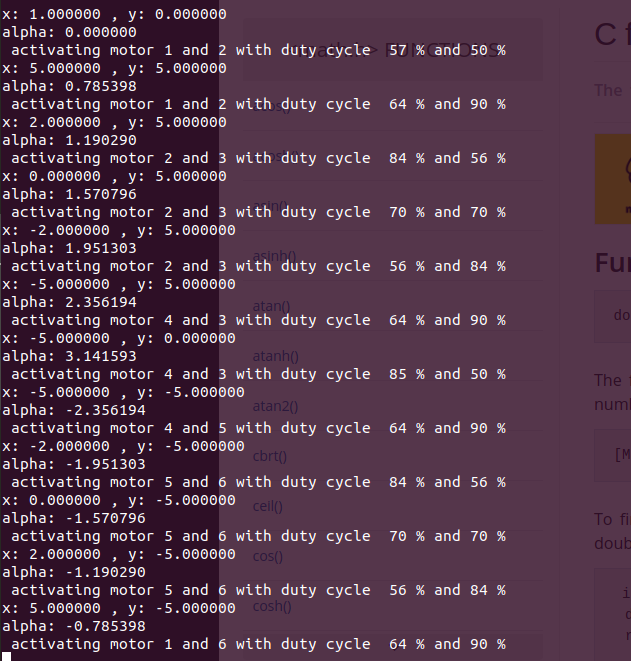
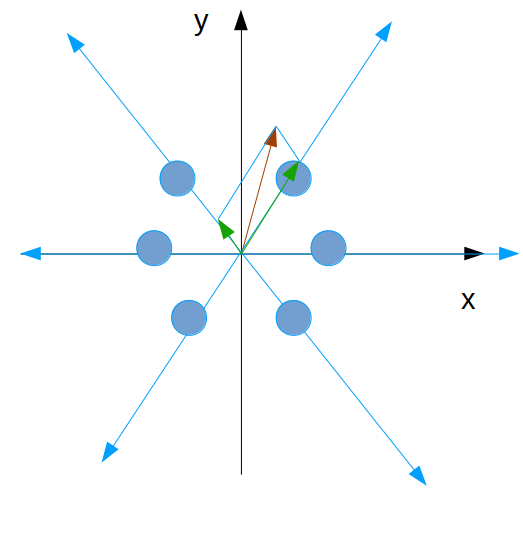
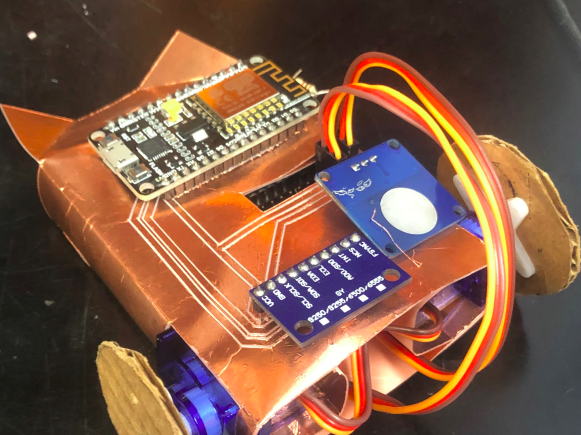
Haptic Feedback Simulates Robot Rats
HCI | Interfacing | Mechatronics
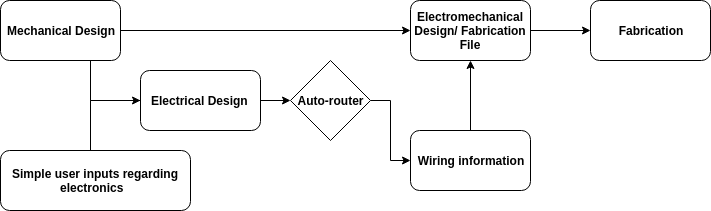
Electromechanical Design system for Foldable Robots
HCI | Flexible Robot
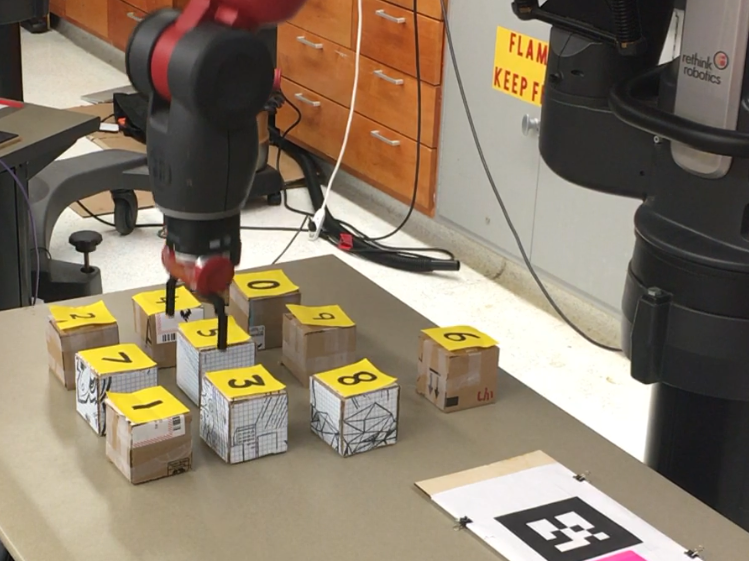
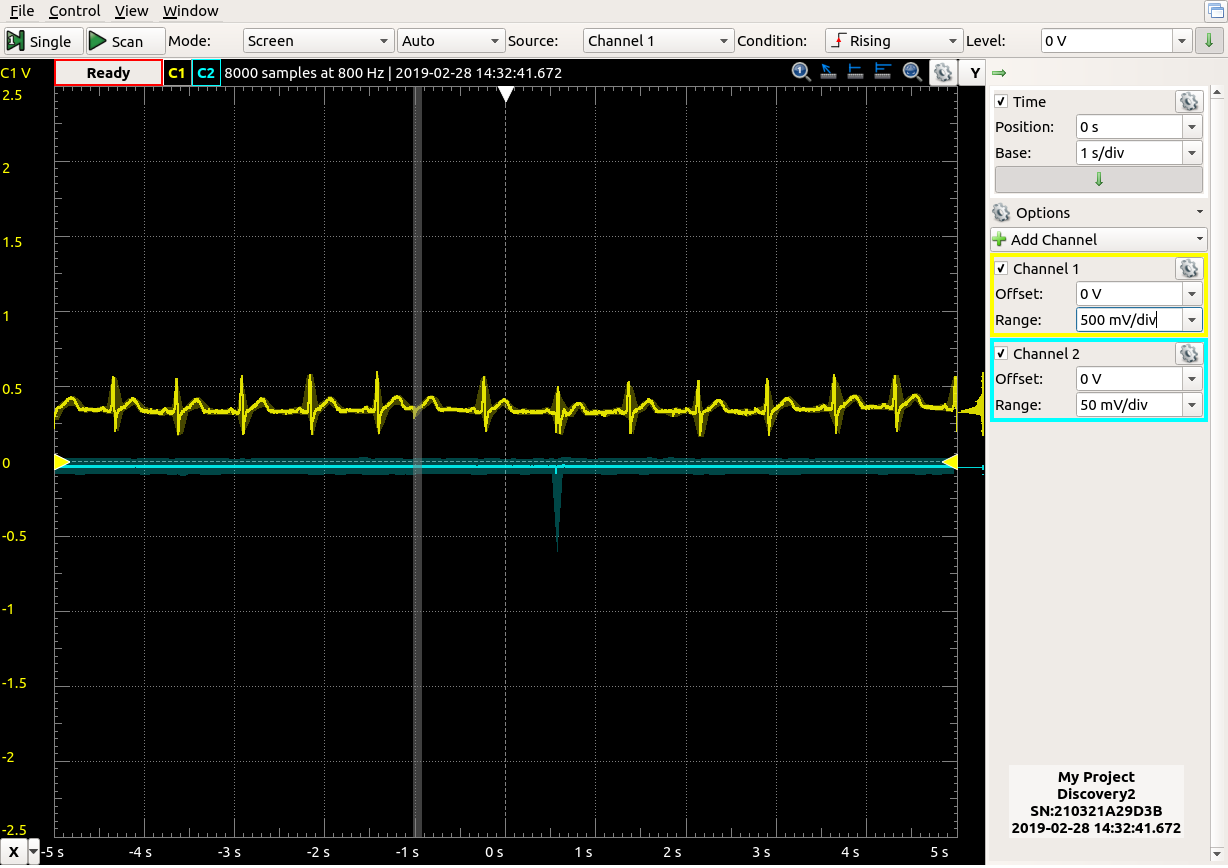
Baxter Manipulation with ROS
ROS | Computer Vision | Robotic Manipulation

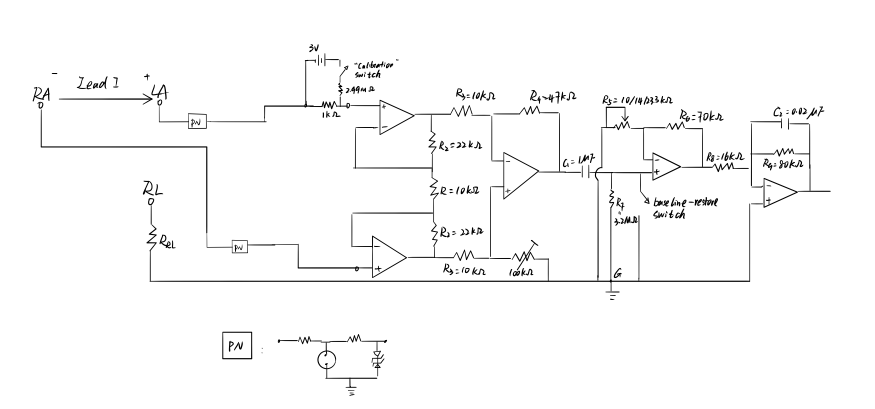
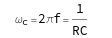
ECG Monitor with Analog2
ECG | Circuit Design | Biosensor
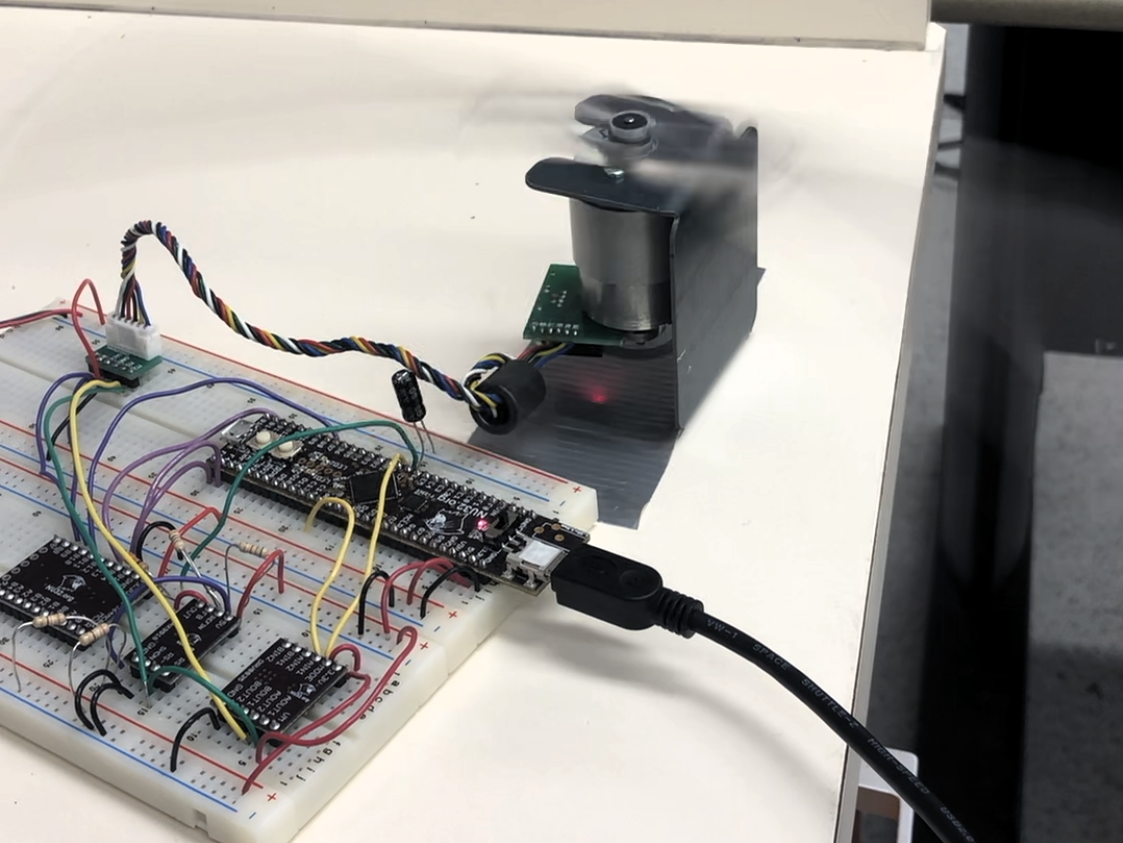
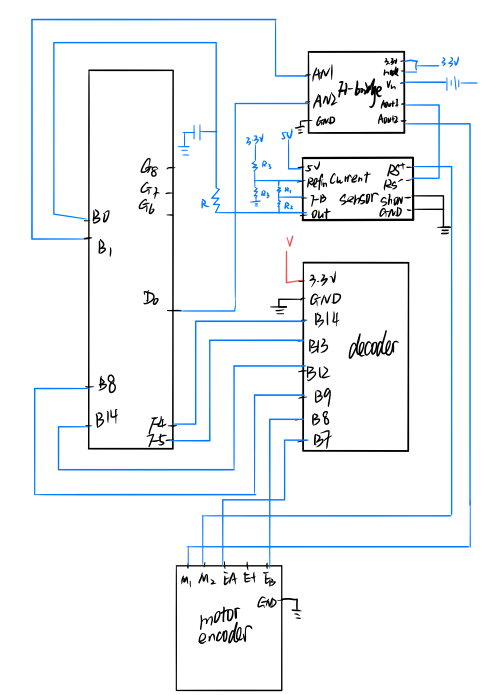
Motor Control with Microcontroller
Feedback Control | Mechatronics | Circuit Design
Tumbler Dynamics Simulation
Dynamics | Simulation